
すなわち自己否定とはいわば 原初殺害 の記憶と言えるそれを 原罪 と呼ぶがおそらくそれは 集団的ななにか であり少なくとも私が個人的になしたことでは絶対にありえないなぜならそれは自己責任の問題にすぎなくなってしまうだろうから. この記事について 詳解OpenCV3の個人用備忘録 著作権的にダメな場合は削除します 覚えておいた方が良さげなこと OpenCV自体に関して Intelアーキテクチャ上で最適化を行いたい場合.
2
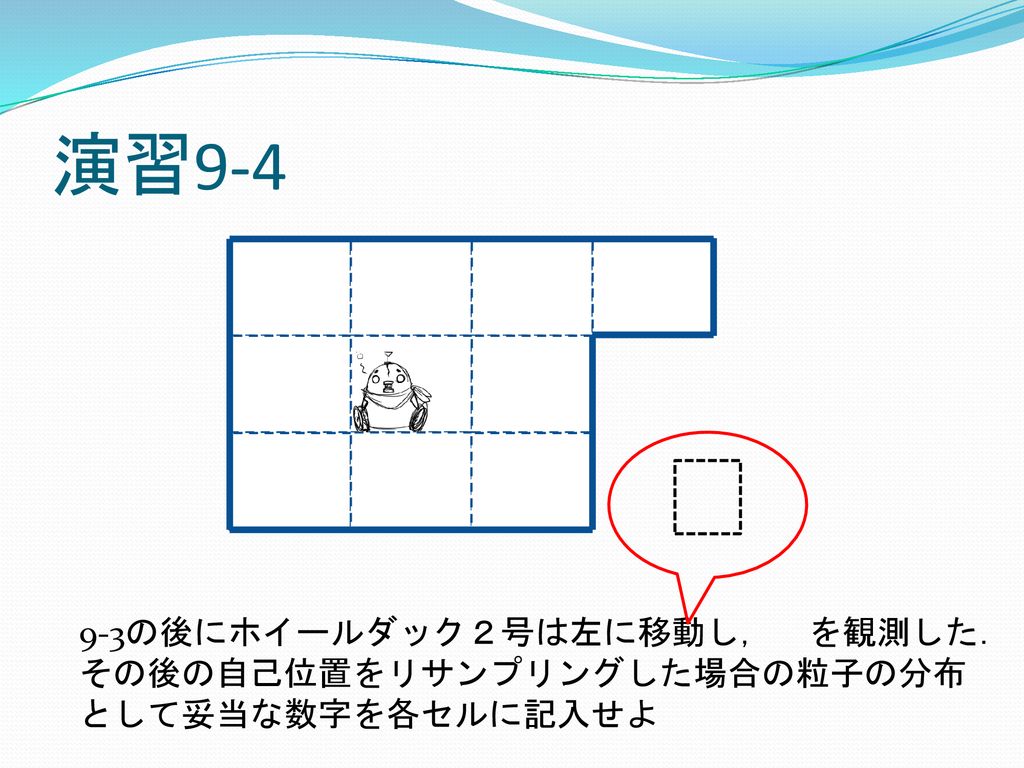
人工知能概論 第9回 位置推定 2 粒子フィルタ Ppt Download

Sparsity In Minom Two Point Clouds Are Matched Via Minom0 And Source Download Scientific Diagram
PyPIで公開されているパッケージのうち科学技術関連のパッケージの一覧をご紹介します 具体的には次のフィルターによりパッケージを抽出しました Intended Audience.
観測物体のクラスを考慮した自己位置推定. ライングラウンド間 位置0 ラインライン間 位置14 2 スイッチs2印加相互接続線の選択位置14ただしスイッチs1と同じ位置ではない 注記 cdについては表8参照 図9非シールド非対称相互接続線に対するcn及びdnの例. 数 字 アルファベット. G検定 単語集について G検定受験時にまとめた単語集を共有します参考にしてください 問題文と回答を単語帳メーカーでリストにした上で学習すると効率が良いかと思います 情報追加内容修正等コメントいただけると助かります.
イ 外部物体に加えた力若しくはトルク外部物体までの距離又は触覚を測定するセンサーからの情報を用いて制御するもの ロ 構造材にチタン合金又は繊維強化複合材料を用いたものであって250ニュートン以上の力又は250ニュートンメートル以上のトルクで作業することができるもの. F-test 帰無仮説が正しければ統計量がF分布に従うような統計学的検定の総称である この名称はロナルドAフィッシャーに敬意を表してジョージWスネデカー英語版によって命名された フィッシャーは1920年代に分散比による統計を最初に開発した. いですから低緯度が望ましのです種子島宇宙センターの位置はe 13058n 3024 です.
B 観測値が観測許容値Ca個を超えた場合 静止測定時間Trで得られた計数値がCaを超えたときは 再度その位置で測定を考慮してもよい計数値がそれでもCaを超えた場合はリークありと判定され. 2724 天球の輝度分布を逆推定 特殊特殊 2725 葉群密度測定用レーザースキャナ 特殊 その他 2726 確率計算器.

2021 505979号 自己位置推定と環境マップ作成を同時に行う方法及び装置 Astamuse
Ssii2019企画 画像および Lidar を用いた自動走行に関する動向

Takatsugu Hirayama S Research Works Nagoya University Nagoya Meidai And Other Places
Ssii2019企画 画像および Lidar を用いた自動走行に関する動向
Tier Iv Tech Blog

Tier Iv Tech Blog
2

2020 095339号 移動体 移動体の制御方法及びプログラム Astamuse





